
Force Calibration and Prediction of Soft Stretch Sensor Based on Deep Learning
Published in 2023 International Conference on Advanced Robotics and Mechatronics (ICARM), 2023
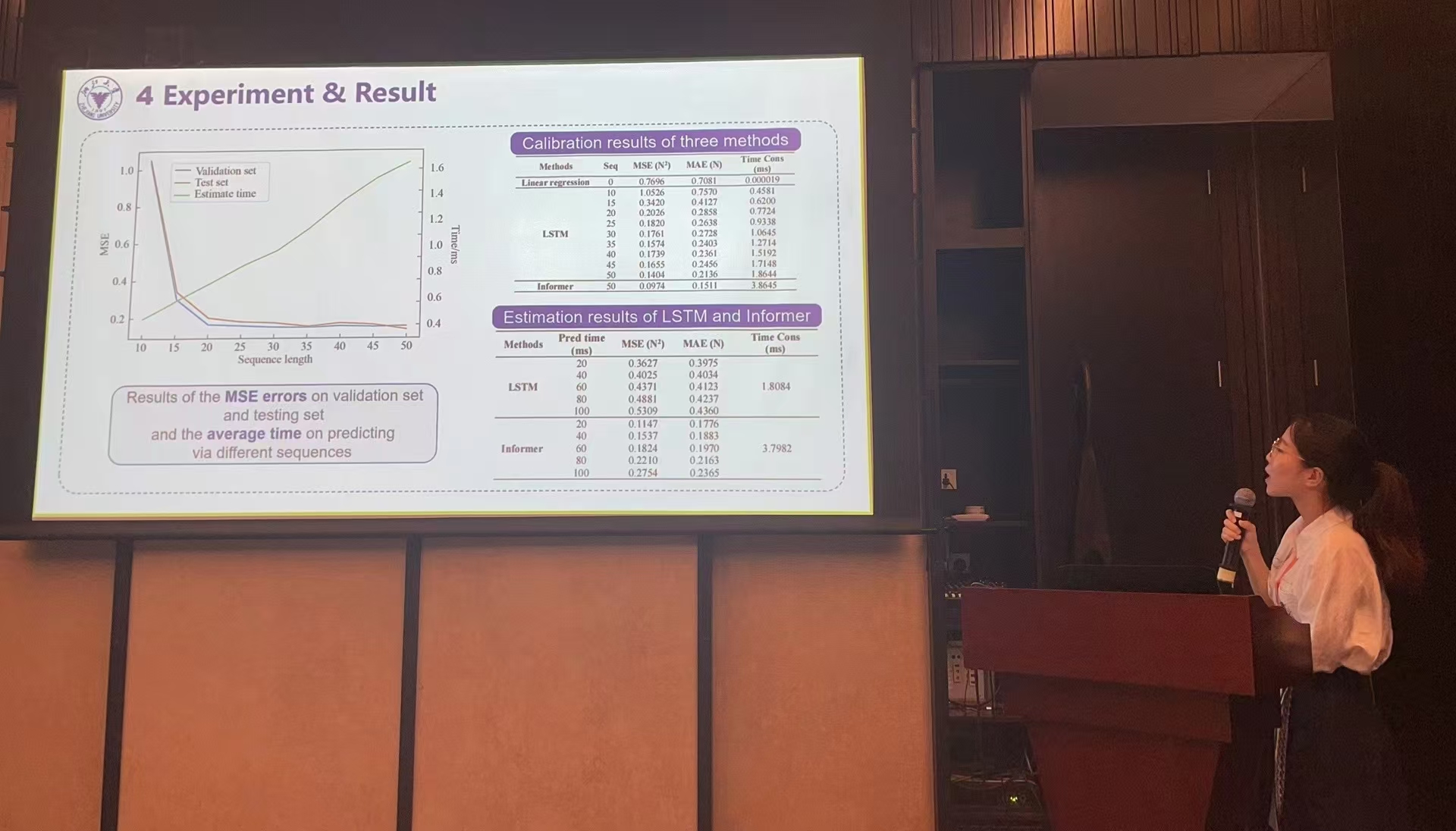
Soft stretch sensors are increasingly used in wearable devices and flexible exoskeleton. This paper presents a novel sensing-actuation integrated unit for elastic tension transmission and force stimation. The unit consists of a capacitive sensor, four elastic bands, which can provide enough stiffness, and two stretchable paper-cut fabric shielding layers, which can greatly shield the external interference. The mechanical and electrical properties of the unit were tested on a universal material testing machine and then a simulation test platform was designed to generate the sine curve with different travels and stretch rates. A great amount of data with a total of 35 cases were collected to train our models. Results demonstrated mean square error (MSE) less than 0.21 N2, normalized root mean square error (NRMSE) less than 1.7% for the selected calibration model, and MSE less than 0.28 N2, NRMSE less than 2.0% for the selected prediction model. Our unit together with its calibration and prediction methods in this paper holds great promise in applications such as lightweight flexible exoskeletons.
Sanya, July 9, 2023